Mitsubishi - RV-7FRLM-D EE-ROB-MIT-2011-00001
¿Tiene más preguntas? ¡Contáctenos!

José María García
+34 601 158 008
j.garcia@gindumac.com
- GINDUMAC
- Productos
- Equipamiento de automatización
- ➤ Venta de Mitsubishi RV-7FRLM-D usados | gindumac.com
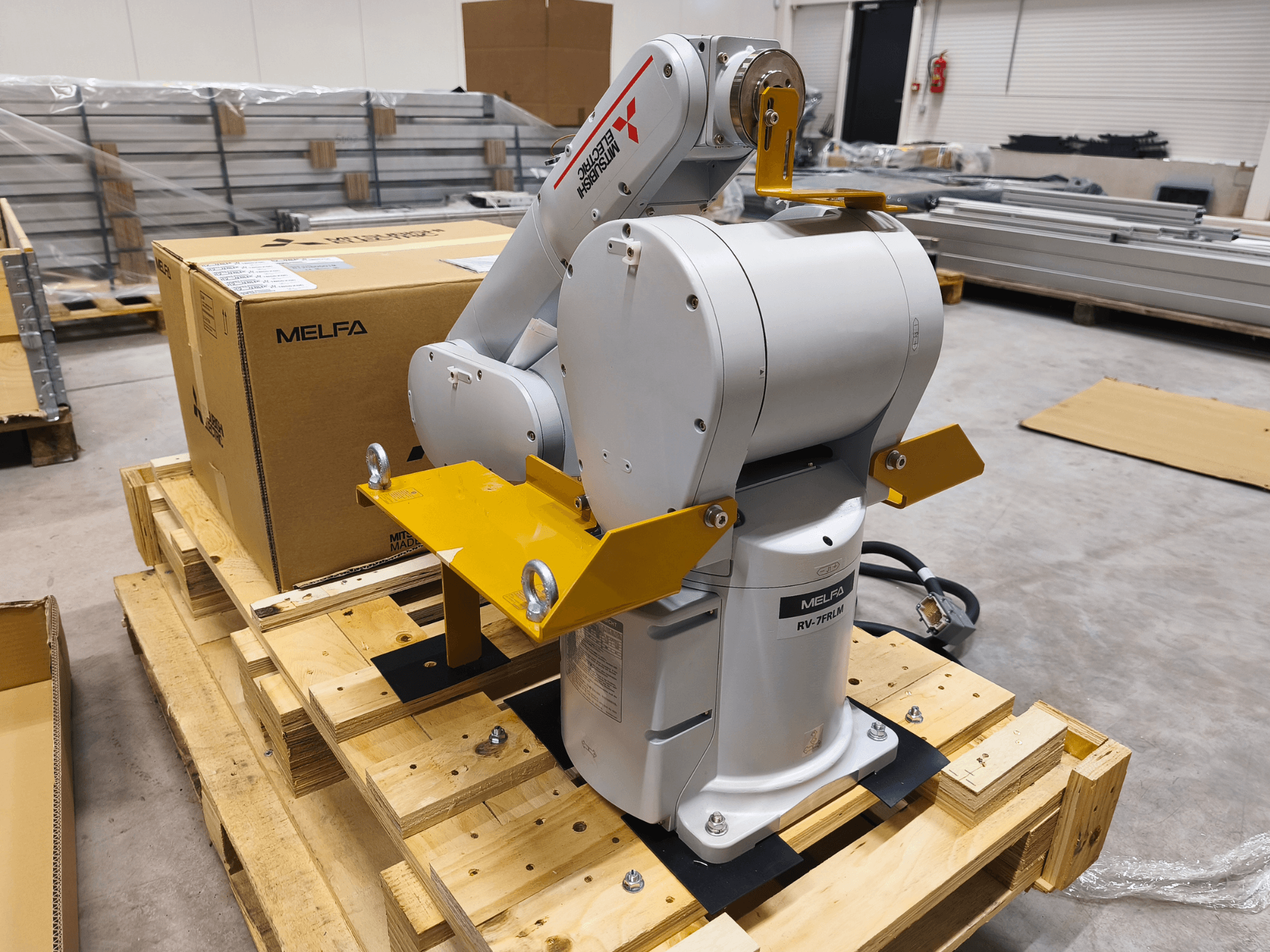
Este brazo robótico de 6 ejes Mitsubishi RV-7FRLM-D se fabricó en 2011. Cuenta con una estructura vertical de articulaciones múltiples, capaz de manipular una carga máxima de 7 kg con un radio de alcance de 908 mm. El robot está equipado con un servomotor de CA y puede instalarse en suelos, techos o paredes. Funciona eficientemente con un tiempo de ciclo de 0,35 segundos y tiene un grado de protección IP67. Considere la oportunidad de comprar este brazo robótico Mitsubishi RV-7FRLM-D. Póngase en contacto con nosotros para obtener más información.
Resumen
- marca: Mitsubishi
- año: 2022
- MODELO: RV-7FRLM-D
- tipo de aplicación: Robótica
- Ubicación: Estonia
- tipo de máquina: Brazo robótico
Información adicional
Estructura: Tipo de articulación múltiple vertical
Especificaciones medioambientales: Niebla de aceite
Grado de protección: IP67
Instalación: Suelo / Techo / Pared
Grados de libertad: 6
Sistema de accionamiento: Servomotor AC (todos los ejes con freno)
Detección de posición: Encoder absoluto
Capacidad de Carga Máxima: 7 kg/ Nominal: 7 kg
Brazo superior: 435 mm
Antebrazo: 470 mm
Radio de alcance máximo: 908 mm
J1: -240° a +240
J2: -110° a +130
J3: de 0° a +162
J4: -200° a +200
J5: -120° a +120
J6: -360° a +360
J1: 288 grados/segundo
J2: 321 grados/segundo
J3: 360 grados/segundo
J4: 337 grados/segundo
J5: 450 grados/segundo
J6: 720 grados/segundo
Velocidad máxima del compuesto: 11000 mm/seg
Duración del ciclo: 0,35 s
Repetibilidad de posición: ±0,02 mm
Condiciones ambientales Temperatura ambiente: 0-40°C /Masa del robot: 67 kg
Par admisible
J4: 16,2 Nm
J5: 16,2 Nm
J6: 6,86 Nm
Inercia admisible
J4: 0,45 kg-m²
J5: 0,45 kg-m²
J6: 0,10 kg-m²
Interfaces de la herramienta Cableado de la herramienta:
8 entradas / 8 salidas para pinza
Cable de señal de pinza multifunción y sensor
LAN × 1 (100BASE-TX)
Tuberías neumáticas de la herramienta:
Primario Ø6 × 2
Secundarios: Ø4 × 8
Controlador Conectado Tipo de Controlador: CR800-07VD /Tipo de control: Independiente
*Pueden existir diferencias entre los datos mostrados y los reales, esto debe ser confirmado por el representante de ventas.
José María García
Opciones de pago
Pago por adelantado
Financiación de activos
RENTING A 36 O 60 MESES